Un innovador algoritmo de inteligencia artificial condensa en segundos lo que la evolución ha llevado miles de millones de años lograr.
Un reciente artículo publicado en la revista Proceedings of the National Academy of Sciences (PNAS) revela un hito en el campo de la inteligencia artificial (IA). Un equipo de investigadores liderado por el profesor adjunto de la Universidad Northwestern, Sam Kriegman, ha desarrollado la primera IA capaz de diseñar robots de manera inteligente desde cero.
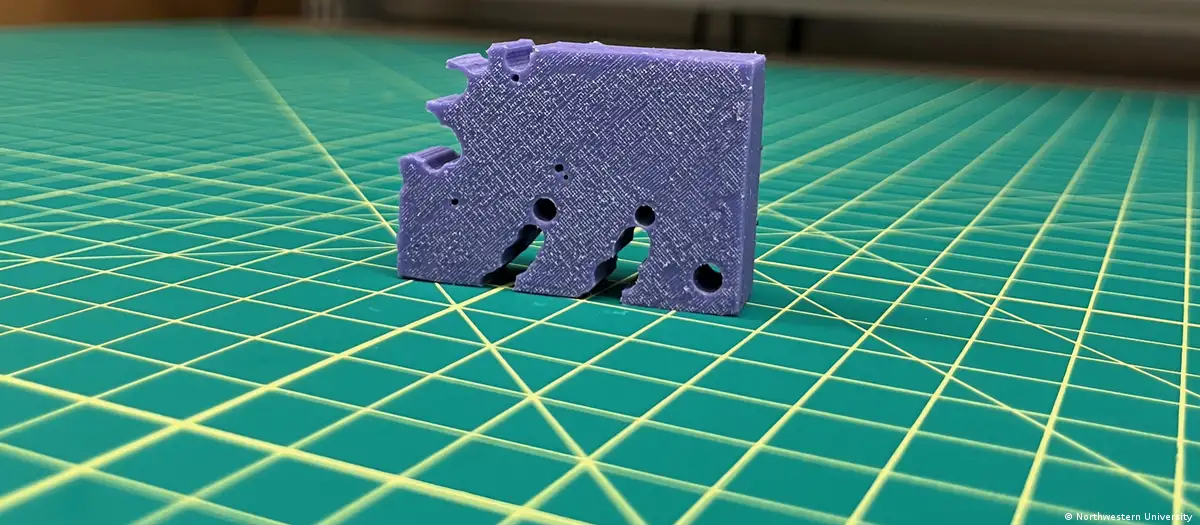
Cuando se encomendó a esta IA la tarea de crear un robot capaz de caminar, sorprendentemente generó un ser que se describió como “pequeño, blando y deforme”, el cual camina de manera irregular al inflarse con aire.
“Le dijimos a la IA que queríamos un robot que pudiera caminar por tierra. Luego simplemente pulsamos un botón y ¡listo!”, aseguró Kriegman, según el comunicado de la Universidad Northwestern. “En un abrir y cerrar de ojos generó un modelo de robot que no se parece en nada a ningún animal que haya pisado la Tierra. Llamo a este proceso ‘evolución instantánea'”, agregó.
“Evolución instantánea”: comprimir millones de años de evolución
Mientras la naturaleza invirtió miles de millones de años en desarrollar las primeras criaturas que caminaban sobre la Tierra, este nuevo algoritmo ha transformado la evolución en un proceso veloz, generando un robot capaz de caminar en cuestión de segundos, en 26, para ser precisos.
En su proceso creativo, la inteligencia artificial comenzó su con un modesto bloque de goma, explorando diversas formas antes de llegar a un diseño final que permitiera el movimiento. Para ello, principios de la evolución natural se utilizaron para entrenar a la IA, aprovechando la posibilidad de observar retrospectivamente los rasgos biológicos que funcionaron y los que no.
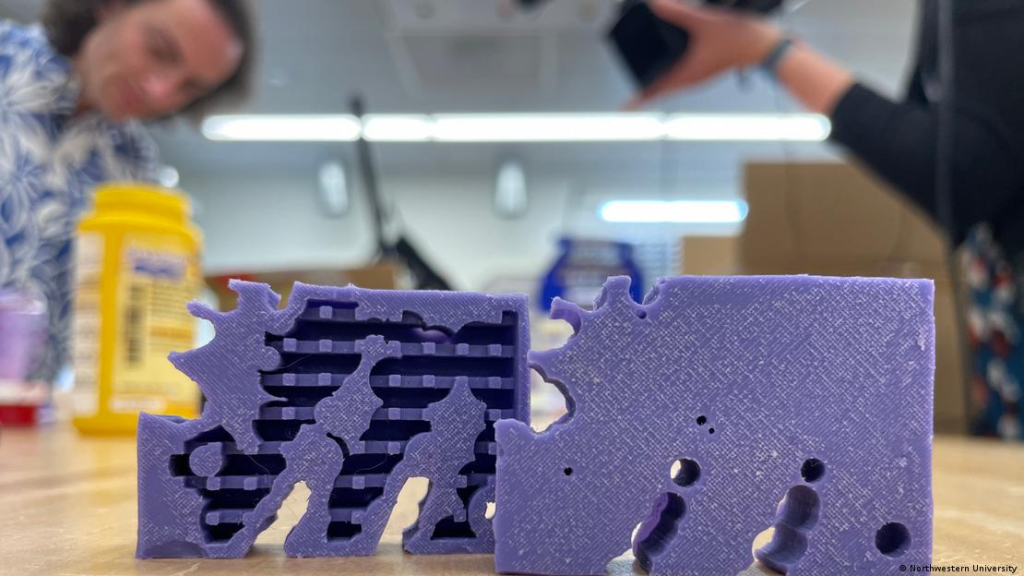
De manera sorprendente, la IA llegó a la misma solución que la naturaleza para la locomoción terrestre: las piernas. Sin embargo, el diseño resultante es bastante diferente de las criaturas naturales, con tres patas, aletas en la espalda, una cara plana y numerosos agujeros.
“Es interesante porque no le dijimos a la IA que un robot debía tener patas”, explica Kriegman. Redescubrió que las patas son una buena forma de desplazarse por tierra”. La locomoción con patas es, de hecho, la forma más eficiente de desplazamiento terrestre”, agregó.
La IA puede crear nuevas posibilidades
En cuanto a la peculiar forma del robot, Kriegman explica que los investigadores no sabían muy bien por qué el robot había llegado a este modelo final con tantos agujeros aparentemente aleatorios.
Una hipótesis, plantea Kriegman, es que la porosidad reduce el peso y añade flexibilidad, permitiendo que el robot doble sus piernas para caminar. A pesar de no comprender completamente la función de estos agujeros, se ha demostrado que son esenciales, aseguró el científico, ya que, al eliminarlos, el robot no puede caminar o lo hace de manera deficiente.
“Cuando los humanos diseñamos robots, tendemos a diseñarlos para que se parezcan a objetos familiares”, dijo Kriegman. “Pero la IA puede crear nuevas posibilidades y nuevos caminos hacia adelante que los humanos ni siquiera han considerado”.
Sin imitar obras previas de humanos
A diferencia de otros sistemas de IA que dependen de supercomputadoras y grandes conjuntos de datos, esta IA muestra un enfoque más eficiente y creativo, sin limitarse a imitar obras previas de humanos.
A medida que esta tecnología continúe avanzando, se vislumbra su potencial para revolucionar diversas áreas. Podría aplicarse para perfeccionar el diseño de robots utilizados en operaciones de búsqueda y rescate en situaciones de desastre, realizar reparaciones en sistemas de alcantarillado de manera más eficiente y segura, e incluso llevar a cabo procedimientos médicos internos en el cuerpo humano, abriendo así nuevas fronteras en el ámbito de la medicina y la cirugía.
Hace dos años, Kriegman captó la atención mediática al presentar los Xenobots, pequeños robots de bioingeniería capaces de reproducirse. En ese estudio, se empleó una versión inicial de este algoritmo para determinar la forma óptima de los cuerpos de estos diminutos robots, que nadaban en placas de Petri.
Fuente: Deutsche Welle